
") STM32C011開發(fā)(1)----開發(fā)板測(cè)試
STM32C011開發(fā)(1)----開發(fā)板測(cè)試
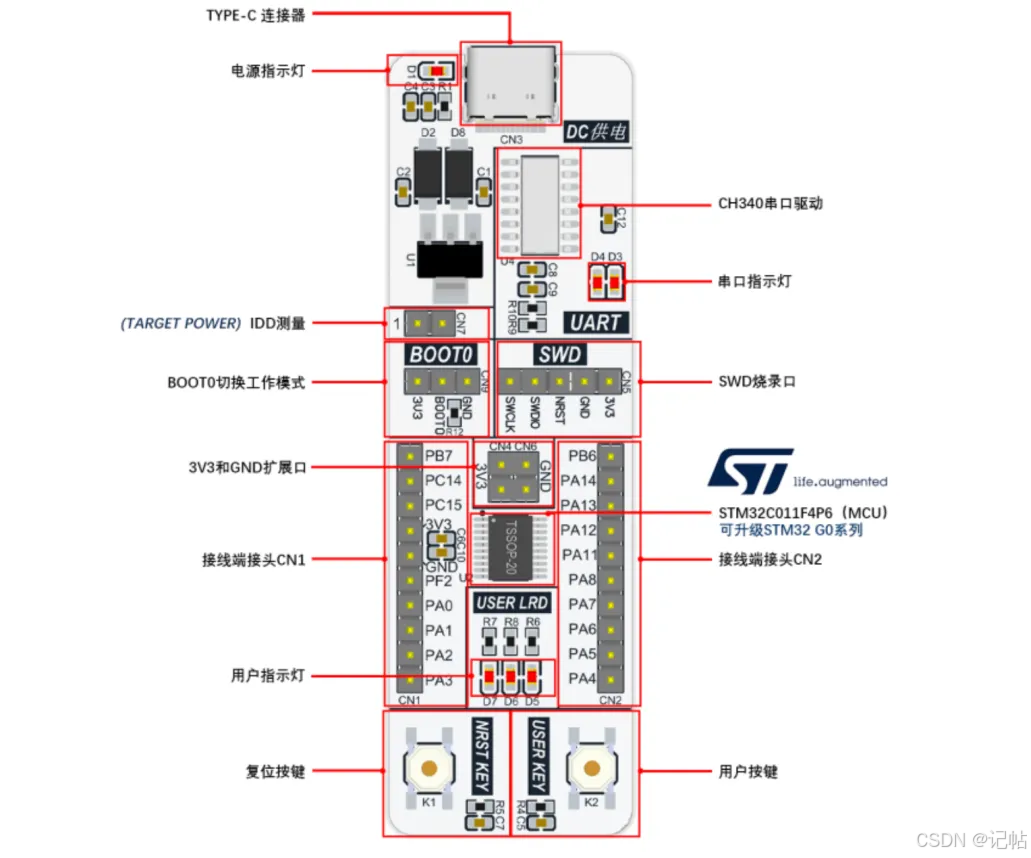
STM32C011F4P6-TSSOP20 評(píng)估套件可以使用戶能夠無(wú)縫評(píng)估 STM32C0 系列TS....
STM32WB55RG開發(fā)(5)----監(jiān)測(cè)STM32WB連接狀態(tài)
STM32WB系列微控制器代表了STMicroelectronics在無(wú)線技術(shù)領(lǐng)域的新一代創(chuàng)新,集成....
STM32WB55RG開發(fā)(3)----生成 BLE 程序連接手機(jī)APP
本項(xiàng)目旨在利用 STM32WB55 微控制器的藍(lán)牙低功耗(BLE)功能,實(shí)現(xiàn)與手機(jī) APP 的無(wú)線連....
STM32WB55RG開發(fā)(2)----STM32CubeProgrammer燒錄
STM32CubeProgrammer (STM32CubeProg) 是一款用于編程STM32產(chǎn)品....
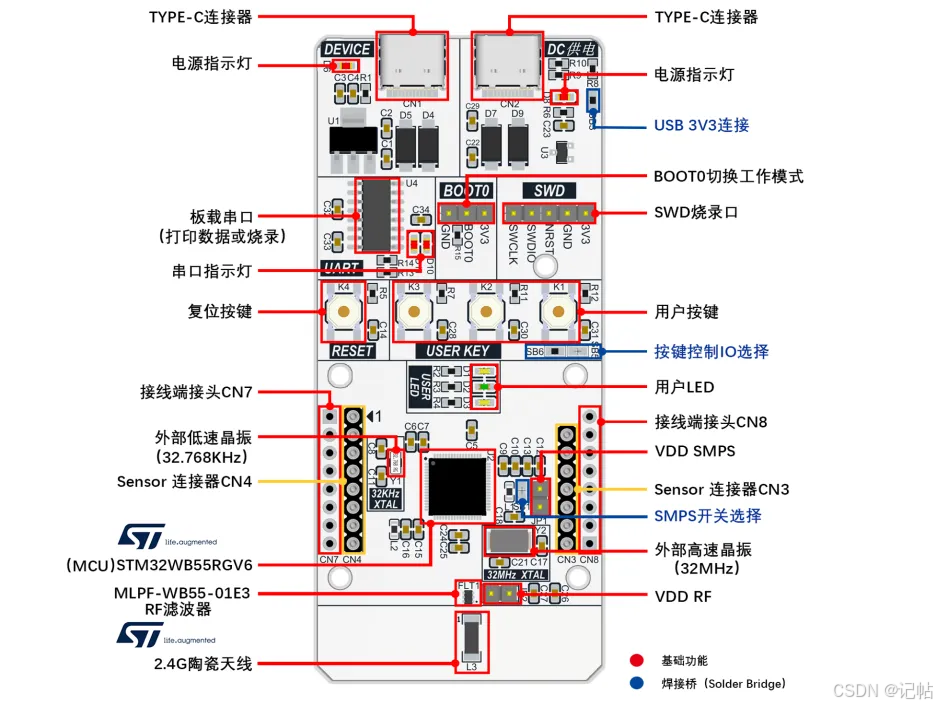
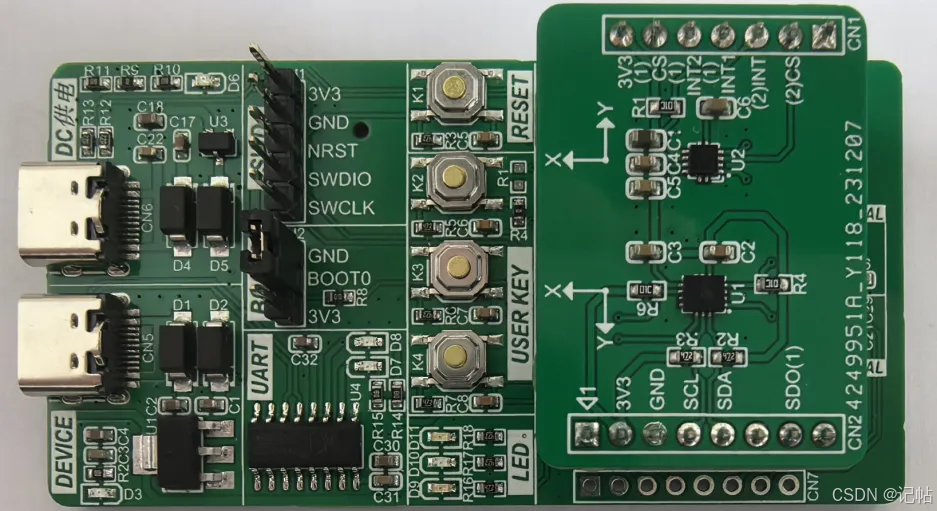
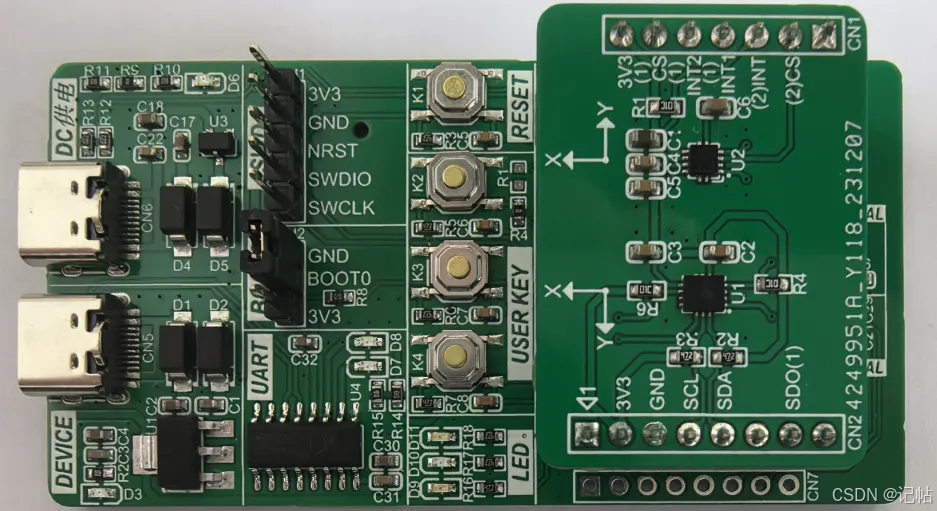
STM32WB55RG開發(fā)(1)----開發(fā)板測(cè)試
STM32WB55 & SENSOR是一款基于STM32WB55系列微控制器的評(píng)估套件。該套件采用先....
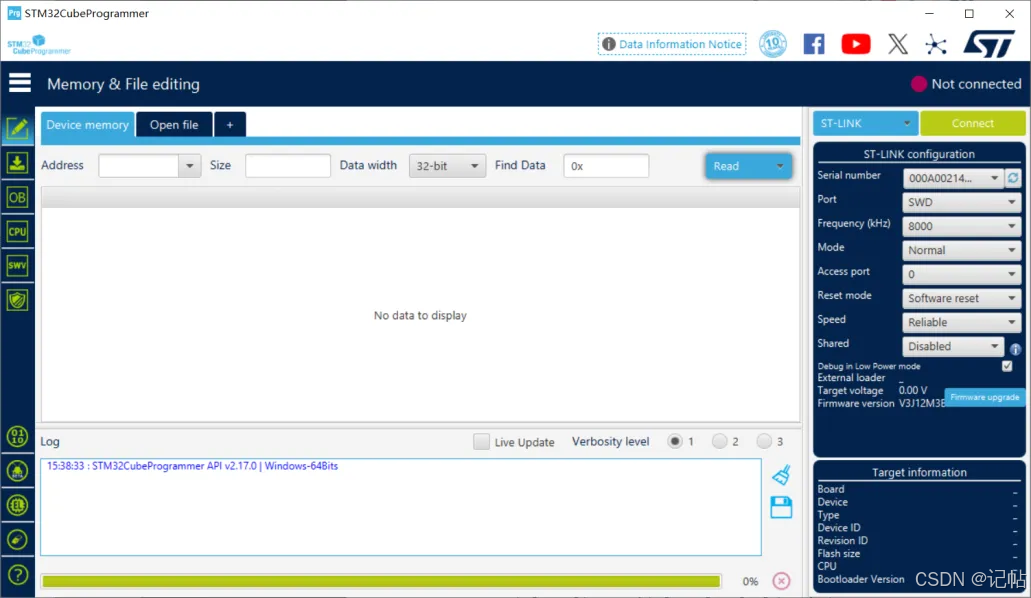
STM32H503開發(fā)(2)----STM32CubeProgrammer燒錄
STM32CubeProgrammer (STM32CubeProg) 是一款用于編程STM32產(chǎn)品....
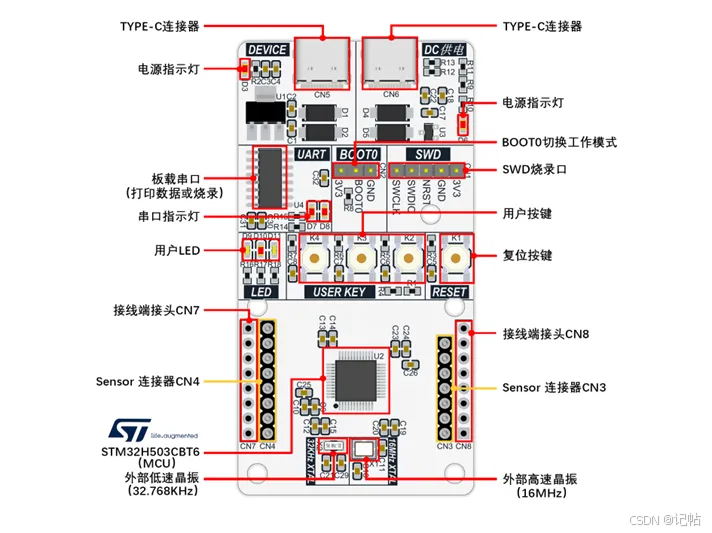
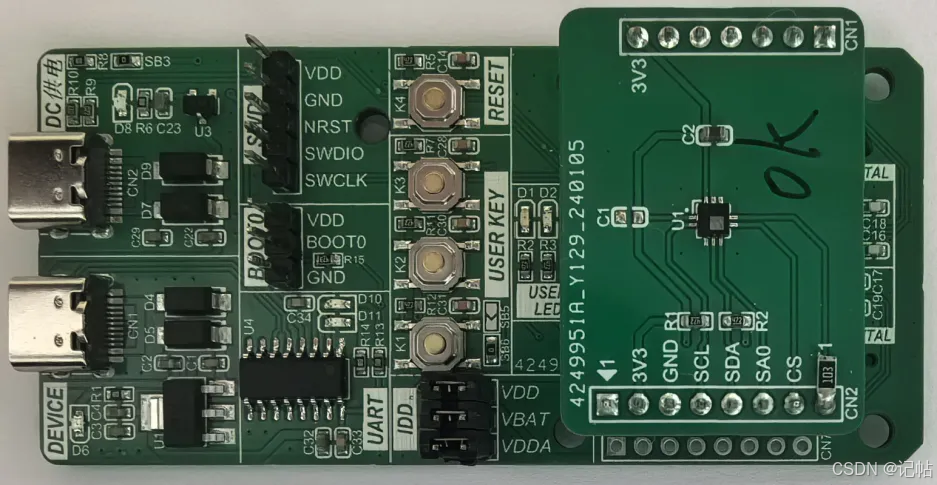
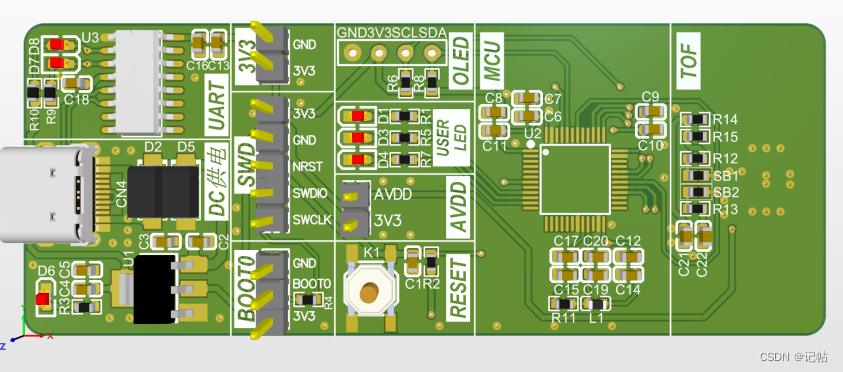
STM32H503開發(fā)(1)----開發(fā)板測(cè)試
STM32H503 & SENSOR是一款基于STM32H5系列微控制器的評(píng)估套件。該微控制器采用了....
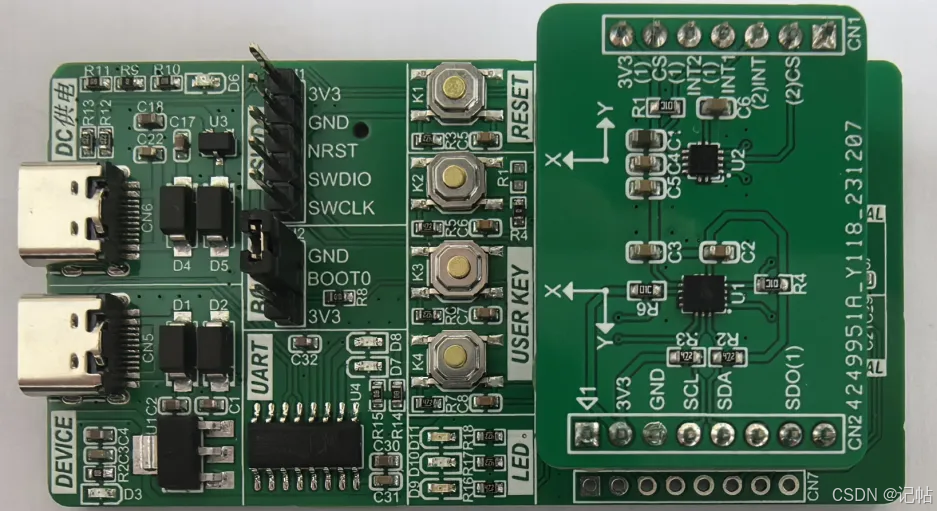
氣壓計(jì)LPS22DF開發(fā)(1)----輪詢獲取氣壓計(jì)數(shù)據(jù)
本文將介紹如何使用 LPS22DF 傳感器來(lái)讀取數(shù)據(jù)。LPS22DF是一款超緊湊型壓阻絕對(duì)壓力傳感器....
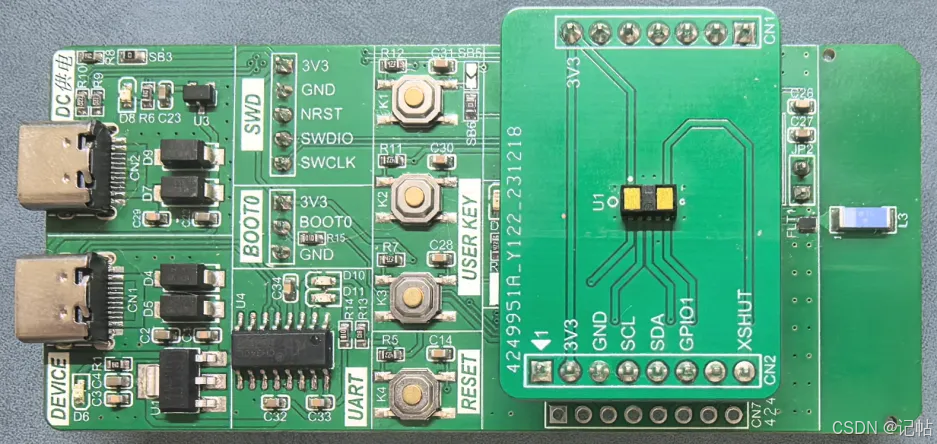
VL53L4CD液位監(jiān)測(cè)(2)----液位檢測(cè)
液位檢測(cè)在工業(yè)自動(dòng)化、環(huán)境監(jiān)測(cè)和消費(fèi)電子等領(lǐng)域中具有廣泛的應(yīng)用價(jià)值。隨著技術(shù)的進(jìn)步,基于飛行時(shí)間(T....
VL53L4CD液位監(jiān)測(cè)(1)----驅(qū)動(dòng)TOF進(jìn)行測(cè)距
VL53L4CD適用于接近測(cè)量和短距離測(cè)量,可實(shí)現(xiàn)從僅僅1 mm到1300 mm的超精準(zhǔn)距離測(cè)量。新....
陀螺儀LSM6DSV16X與AI集成(14)----上報(bào)匿名上位機(jī)
本文介紹了如何將 LSM6DSV16X 傳感器的姿態(tài)數(shù)據(jù)通過(guò)匿名通信協(xié)議上報(bào)到上位機(jī)。通過(guò)獲取傳感器....
陀螺儀LSM6DSV16X與AI集成(13)----中斷獲取SFLP四元數(shù)
本文將介紹如何通過(guò)中斷機(jī)制獲取 LSM6DSV16X 傳感器的 SFLP(Sensor Fusion....
LSM6DSV16X基于MLC智能筆動(dòng)作識(shí)別(4)----中斷獲取智能筆狀態(tài)
LSM6DSV16X 支持通過(guò)中斷(INT)輸出 MLC(機(jī)器學(xué)習(xí)核)識(shí)別的動(dòng)作。具體來(lái)說(shuō),MLC ....
LSM6DSV16X基于MLC智能筆動(dòng)作識(shí)別(3)----MEMS Studio訓(xùn)練數(shù)據(jù)
MEMS-Studio是一套完整的桌面軟件解決方案,專為開發(fā)嵌入式AI功能、評(píng)估嵌入式庫(kù)、分析數(shù)據(jù),....
LSM6DSV16X基于MLC智能筆動(dòng)作識(shí)別(2)----MLC數(shù)據(jù)采集
MLC 是“機(jī)器學(xué)習(xí)核心”(Machine Learning Core)的縮寫。在 LSM6DSV1....
LSM6DSV16X基于MLC智能筆動(dòng)作識(shí)別(1)----輪詢獲取陀螺儀數(shù)據(jù)
本文將介紹如何使用 LSM6DSV16X 傳感器來(lái)讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗(yàn)證設(shè)備I....
STHS34PF80高靈敏度紅外感應(yīng)器(2)----InfraredPD存在感應(yīng)檢測(cè)
InfraredPD 主要作用是通過(guò)與 STHS34PF80 紅外傳感器配合,提供對(duì)存在感應(yīng)和運(yùn)動(dòng)檢....

STHS34PF80高靈敏度紅外感應(yīng)器(1)----獲取人體存在狀態(tài)
STHS34PF80是一款高性能的紅外(IR)傳感器,特別適用于檢測(cè)存在感和運(yùn)動(dòng)。其主要特點(diǎn)是高靈敏....

VL53L1CB TOF開發(fā)(2)----多區(qū)域掃描模式
多區(qū)域掃描模式是 VL53L1 飛行時(shí)間 (Time-of-Flight, ToF) 傳感器的一項(xiàng)高....
VL53L1CB TOF開發(fā)(1)----驅(qū)動(dòng)TOF進(jìn)行測(cè)距
TOF(飛行時(shí)間)傳感器是一種利用光的飛行時(shí)間原理來(lái)測(cè)量物體與傳感器之間距離的技術(shù)。VL53L1 是....

陀螺儀LSM6DSV16X與AI集成(12)----SFLP獲取四元數(shù)
在現(xiàn)代的運(yùn)動(dòng)跟蹤和姿態(tài)檢測(cè)應(yīng)用中,低功耗、高精度的傳感器數(shù)據(jù)融合處理變得越來(lái)越重要。LSM6DSV1....

陀螺儀LSM6DSV16X與AI集成(11)----融合磁力計(jì)進(jìn)行姿態(tài)解算
MotionFX庫(kù)包含用于校準(zhǔn)陀螺儀、加速度計(jì)和磁力計(jì)傳感器的例程。 將磁力計(jì)的數(shù)據(jù)與加速度計(jì)和陀螺....

陀螺儀LSM6DSV16X與AI集成(10)----獲取磁力計(jì)數(shù)據(jù)
本文將介紹如何使用 LIS2MDL 傳感器來(lái)讀取數(shù)據(jù)。主要步驟包括初始化傳感器接口、驗(yàn)證設(shè)備ID、配....
陀螺儀LSM6DSOW開發(fā)(10)----陀螺儀校準(zhǔn)
在現(xiàn)代電子設(shè)備中,陀螺儀傳感器被廣泛用于測(cè)量設(shè)備的旋轉(zhuǎn)運(yùn)動(dòng)。然而,由于各種環(huán)境因素和制造工藝的影響,....
磁力計(jì)LIS2MDL開發(fā)(4)----MotionMC 執(zhí)行磁力計(jì)校準(zhǔn)
磁力計(jì)測(cè)量結(jié)果容易受到周圍環(huán)境中的硬鐵(Hard Iron)和軟鐵(Soft Iron)效應(yīng)的干擾,....
驅(qū)動(dòng)LSM6DS3TR-C實(shí)現(xiàn)高效運(yùn)動(dòng)檢測(cè)與數(shù)據(jù)采集(12)----加速度校準(zhǔn)
MotionAC 是 STMicroelectronics 提供的一款用于加速度計(jì)校準(zhǔn)的中間件庫(kù)。該....
陀螺儀LSM6DSOW開發(fā)(9)----加速度校準(zhǔn)
MotionAC 是 STMicroelectronics 提供的一款用于加速度計(jì)校準(zhǔn)的中間件庫(kù)。該....
驅(qū)動(dòng)LSM6DS3TR-C實(shí)現(xiàn)高效運(yùn)動(dòng)檢測(cè)與數(shù)據(jù)采集(11)----磁力計(jì)校準(zhǔn)
磁力計(jì)校準(zhǔn)是確保傳感器數(shù)據(jù)準(zhǔn)確性和可靠性的關(guān)鍵步驟。磁力計(jì)用于測(cè)量地球磁場(chǎng),并在導(dǎo)航、定位、姿態(tài)測(cè)量....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)